
Следующий марсоход НАСА будет амебой
В НАСА запатентовали новый дизайн роботов для изучения планет и астероидов. В отличие от привычных лабораторий на колесах, новый робот будет переползать с места на место, как амеба. Благодаря новой концепции, ученым не придется тратить часы на обсуждение возможных рисков езды по каждому мелкому камню.
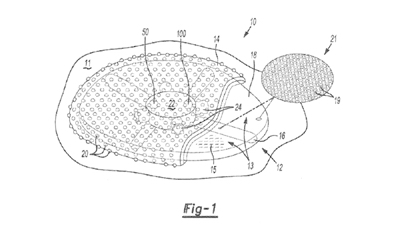
В будущем НАСА намерено отказаться от «традиционной» колесной конструкции роботов в пользу принципиально новых машин. На рисунке изображена концепция мягкого робота-амебы
Новый дизайн получил название «аморфный робот для движения по поверхности». Это радикально новая конструкция, в которой нет ни одного колеса. Корпус робота-амебы выполнен из прочного мягкого материала и может менять форму. Внутри корпуса расположен блок управления, научная аппаратура и механизмы для контроля формы внешней оболочки. Для изменения формы предполагается использовать одну из технологий: мягкие емкости с жидкостью, насос и набор клапанов; магниты с переключаемой полярностью; меняющие форму ячеистые полимерные емкости с наполнителем. Любая из этих технологий позволяет роботу сжимать одну часть корпуса и растягивать другую. Таким образом робот передвигается, как амеба.
Скорость передвижения у робота-амебы невысока, но зато такая машина имеет очень высокую проходимость по каменистому и рыхлому грунту, снегу, льду. Кроме того, герметичный мягкий корпус лучше защищен от погодных факторов и ударов, а изменение формы помогает в условиях сильного запыления. Например, на Марсе обычные марсоходы постепенно покрываются слоем пыли и песка, что снижает эффективность солнечных панелей и может нарушить работу научной аппаратуры. В свою очередь, робот-амеба стряхивает пыль и песок во время движения.
В отличие от колесных планетоходов, робот-амеба легко масштабируется и может быть разных размеров: от миниатюрных зондов размером с ладонь, до крупных аппаратов весом в сотни килограмм. Подобных роботов можно применять не только в космосе, но и на Земле, например при инспектировании трубопроводов или для спасательных операций.
 Поделиться
Поделиться




