
Российская концепция для исследования Марса — рой двухколесных роботов
Со времен миссии Mars Pathfinder, то есть больше 20 лет, исследователи Марса продолжали использовать базовую конструкцию марсохода, которая представляет собой шестиколесный автономный исследовательский аппарат с научными инструментами на борту.
Российские ученые считают, что марсианская миссия могла бы выполнить больше задач за тот же время, если бы она включала в себя несколько роботов с различным оснащением, одновременно выполняющих отдельные поручения в разных местах и периодически объединяющихся для более сложных задач. Модульная система изложена в статье в Acta Astronautica — она предполагает рой (группу) из четырех двухколесных роботов, которые могут работать независимо друг от друга или объединяться.
В основе концепции используется групповая робототехника (Swarm Robotics) — инженерная дисциплина, которая предполагает координацию систем группы роботов децентрализованным и распределенным образом с использованием алгоритмов группового ИИ для выполнения задач, которые отдельные, более простые роботы не могут выполнить.
Основные идеи групповой робототехники взяты из природы: примерами служат птичьи стаи, колонии муравьев, рои пчел, косяки рыб, стада животных и другие группы. Коллективное поведение в групповой робототехнике возникает в результате взаимодействия отдельных роботов со своими соседями и их непосредственным окружением. Искусственный групповой интеллект сочетает в себе принципы биологии, этологии, инженерии и информатики. Ни один из роботов не контролирует всю группу — каждая из машин использует информацию только от своего ближайшего соседа, чтобы принять наилучшее решение. Однако коллективное поведение, являющееся результатом этих решений, является сложным и устойчивым.
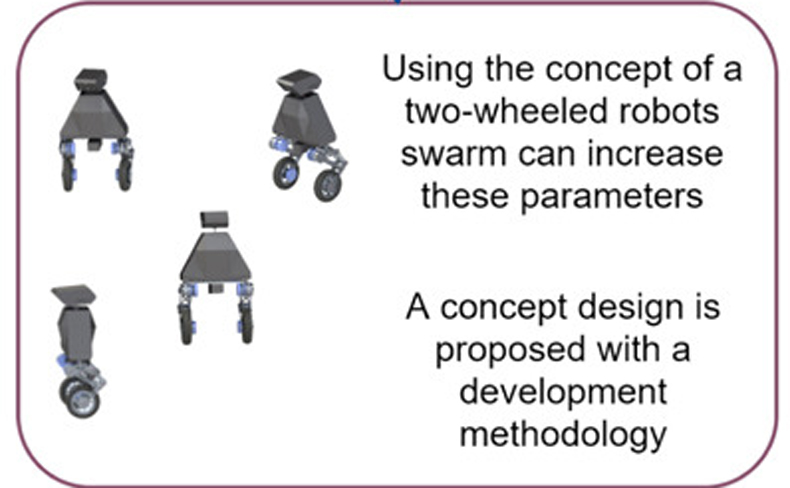
В основном, перед робототехниками стояла задача оптимизации: максимально увеличить время работы и пройденное аппаратами расстояние, при этом значительно не наращивая стоимость миссии. Исследователи выявили, что вместо одного шестиколесного вездехода оптимальнее использовать четыре двухколесные машины, каждая из которых везет исследовательские инструменты и испытывает только критически важную полезную нагрузку. Также они предлагают использовать алгоритмы вычисления границы Парето для проверки таких показателей, как скорость исследования, срок службы миссии и стоимость миссии.
То есть даже если три из четырех машин выходят из строя, оставшийся робот может выполнять изрядную часть работы и передавать данные на Землю. Это даст возможность получить больше полезных результатов по итогам миссии. А при задачах, требующих наибольшей устойчивости, таких как захват предметов с поверхности, два роботизированных вездехода с двумя колесами могут соединяться вместе, образуя устойчивую четырехколесную базу.
Однако применение роботизированной группы не ограничивается только исследованием Марса. Подобная концепция может применяться для изучения Луны или даже здесь, на Земле: двухколесные автономные роботы могут быть полезны в различных областях, таких как сельское хозяйство, подводные исследования или поисково-спасательные операции. В июле 2021 года на полях в Краснодаре уже были проведены испытания с двухколесными роботами.
 Поделиться
Поделиться




