
Кофе поможет роботам передвигаться по бездорожью
Люди воспринимают многое как должное, и способность ходить — не исключение. Но чтобы преодолеть усыпанную камнями тропу или холм, покрытый корнями деревьев, задействуется более 600 мышц. А для робота ходьба по сложным поверхностям, будь то песчаная береговая линия или каменистая марсианская поверхность, является непростой задачей.
Одним из основных видов использования шагающих роботов является исследование опасных мест бедствий и крушений. Чтобы выполнять свою задачу, роботам необходимо быстро и эффективно передвигаться по естественной неровной поверхности — везде, где могут пройти люди. Но при столкновении с препятствиями у шагающих механизмов возникают проблемы. Причем часто замена их на колесных или гусеничных роботов не помогает — им тоже не преодолеть сложные препятствия.

Робот, оснащенный «кофейными» ногами, двигается на 40% быстрее. Изображение: UC San Diego
Исследователи из Калифорнийского университета в Сан-Диего обнаружили, что шагающие роботы могут двигаться гораздо быстрее и эффективнее, если надеть на них специальную обувь. Используя латекс и кофейную гущу, команда разработала гибкие роботизированные ботинки, которые позволяют роботу перемещаться на 40% быстрее по неровным поверхностям — деревянным щепкам, гальке и, возможно, будущим внеземным поверхностям.
Каждая робо-нога, разработанная командой UCSD, состоит из гибкой сферы с латексной мембраной, которую заполнили рыхлой сухой кофейной гущей. При подъеме и перемещении по воздуху робо-ступни остаются мягкими, но когда их прижимают к земле, они принимают форму того препятствия, на которое наступают, а затем спрессовываются. Спрессовывание возникает благодаря явлению, известному как «гранулярное сцепление».
Сцепление происходит, когда плотность частиц увеличивается, что препятствует их течению. В результате материал заклинивает и его свойства соответствуют твердому веществу. Опорные конструкции помогают гибким ножкам оставаться жесткими во время заклинивания, а при подъеме гибкие наполненные кофейной гущей ноги разжимаются и ослабляются. Иными словами, когда нога робота встречается с поверхностью, «ботинок» укрепляется и соответствует форме поверхности под ним. Когда робот поднимает ногу — «ботинок» расклинивается до следующего контакта с землей.
Для тестирования команда исследователей использовала коммерческого робота-гексапода с шестью ногами. Ученые создали встроенную систему для создания отрицательного и положительного давления, чтобы помочь контролировать сцепление. Эта система работает как вакуум, который всасывает воздух из кофейной гущи для придания жесткости и последующего ослабления ноги.
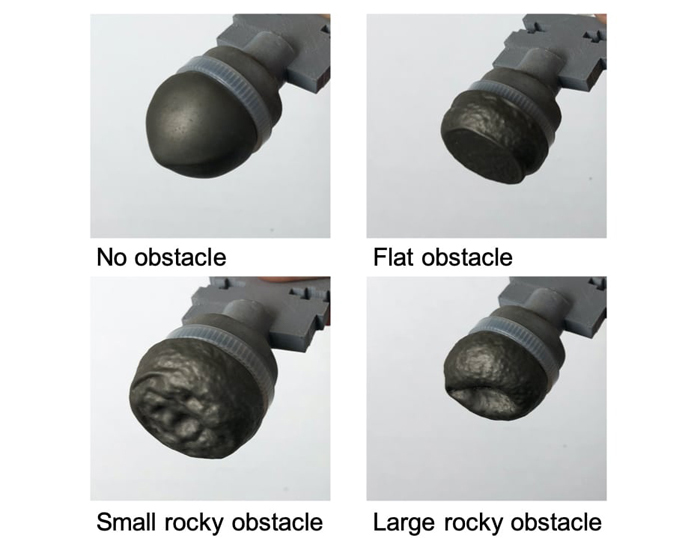
Мягкая робонога адаптируется под тип поверхности, на который она ступает, что позволяет роботу ходить быстрее. Изображение: UC San Diego
Исследователи проверили ботинки на ровной поверхности, щепках и гальке, а также в сценарии без использования вакуумной системы. Оказалось, что при пассивном заклинивании (использование веса робота и отсутствие вакуума, чтобы откачать воздух) ботинки лучше всего работают на ровной поверхности. При активном вмешательстве робоноги показали себя лучше всего на сыпучей горной породе. В обоих случаях они помогли роботу лучше сцепляться с землей, что привело к более быстрому передвижению и примерно на 40% увеличило скорость техники.
«Природный мир полон сложных условий для прогулочных роботов — скользкие, каменистые поверхности и мягкие субстраты затрудняют ходьбу, — отметил Ник Грэвиш, профессор кафедры механического и аэрокосмического машиностроения Калифорнийского университета в Сан-Диего, соавтор исследования. — Ноги, способные адаптироваться к различным типам грунта, помогут роботам улучшить мобильность».
Следующая задача ученых — разработать датчики в нижней части ног, чтобы электронная панель управления могла определять тип земли, на которую робот собирается ступить. Таким образом, они могут улучшить алгоритмы управления, чтобы быстрее переключаться между активным и ослабленным сцеплением.
 Поделиться
Поделиться




