
Искусственные мышцы получились даже лучше обычных: в чем секрет?
Для разработки новых и продвинутых технологий срабатывания в мягкой робототехнике (направлении, нацеленном на конструирование роботов из совместимых мягких материалов, подобных тканям живых существ) нередко используются принципы биомиметики (биомимикрии). Эти принципы подразумевают имитацию движения мышц человека приводами машинных механизмов. Но, например, гидравлические и электрические двигатели довольно производительны, при этом жесткость не позволяет широко их использовать именно в робототехнике.
В университете Северной Аризоны (NAU) разработали искусственную мускулатуру с высокой эффективностью. Новая разработка на основе гидравлического привода обеспечивает более человекоподобные движения благодаря ее гибкости и способности адаптироваться и даже опережает человеческие мышцы по ряду характеристик.

Сами исследователи назвали новые приводы «каватаппи» из-за их схожести с одноименной разновидностью итальянской пасты, коротких рифленых спиралей с небольшим числом витков.
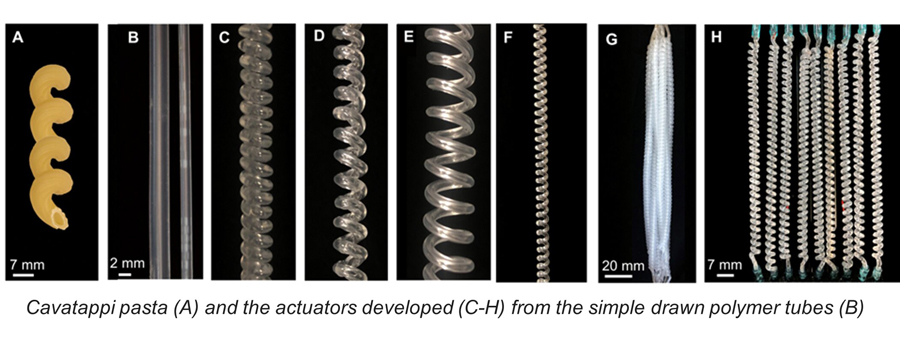
Гидравлический привод искусственных мышц изготовлен из недорогих полимерных трубок. Срабатывание происходит в результате воздействия на трубки: сначала они вытягиваются, что усиливает анизотропию их микроструктуры, а затем скручиваются и по спирали сматываются.
После вытягивания и скручивания гидравлическое или пневматическое давление внутри трубки приводит к локальному раскручиванию спиральной микроструктуры. Это раскручивание проявляется как сокращение шага спирали.
При наличии источника гидравлической или пневматической активации эти устройства могут существенно превосходить аналогичные технологии срабатывания с термической активацией в отношении ширины полосы срабатывания, эффективности, моделирования и управляемости, а также в практической реализации. Разработка способна генерировать больше энергии, поэтому хороша для робототехники.
Уже на начальном этапе разработчики продемонстрировали, что мускулатура каватаппи сокращается более чем на 50% от своей первоначальной длины, а эффективность механического сокращения составляет около 45%. Кроме того, искусственные мышцы каватаппи имеют максимальную удельную теплоту и мощность 0,38 кДж/кг и 1,42 кВт/кг соответственно. Это, в свою очередь, в 10 и 5 раз выше, чем у скелетной мускулатуры в теле человека. Дальнейшее развитие этой технологии, по мнению ученых, приведет к еще более высокой производительности.

Изначально скрученные полимерные трубки, лежащие в основе новой технологии, считались революционной идеей — приводы с ними были мощными, легкими и дешевыми. Но они были медленными и очень неэффективными, так как требовали нагрева и охлаждения. А их эффективность вообще составляла всего около 2%.
Мышцы каватаппи позволяют обойти эти недочеты, так как в разработке используется жидкость под давлением для приведения их в действие. И по этой причине есть все шансы, что технология будет широко использоваться в «мягкой» робототехнике, обычных роботизированных приводах (например, для шагающих роботов), а также в экзоскелетах.
 Поделиться
Поделиться




