
Чудеса адаптации: роботы приспосабливаются, меняя форму и даже походку
Например, марокканский паук-флик-флак, когда чувствует опасность, превращается в шар и откатывается в безопасное место. И это не единственный образец того, как способность менять форму помогает выживать насекомым и другим существам. Исследователи из Йельского университета решили, что такое свойство будет полезно и для роботов.

Раньше робототехники экспериментировали с формой роботов, но с некоторыми ограничениями. Теперь ученые пошли дальше: они создали шагающего четвероногого робота, который в определенных условиях может принимать круглую форму и менять «походку», таким образом приспосабливаясь к различным окружающим условиям.
Если сравнить роботов, способных трансформироваться, с роботами, форма которых остается неизменной, то оказывается, что в некоторых обстоятельствах у первых есть весомое преимущество. В научном эксперименте на плоских либо слегка наклонных поверхностях лучше показывали себя роботы, внутри которых надувался пузырь, за счет чего они принимали круглую форму и начинали катиться к месту назначения.
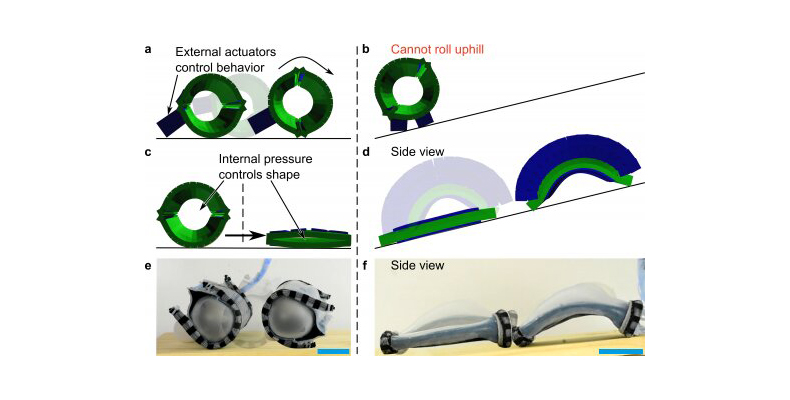
Правда, эти же роботы проблематично одолевали подъемы, часто скатываясь вниз. Здесь уже лучше справлялись роботы, которые трансформировались и становились плоскими, как блин, и имитировали движения червя для передвижения.
Прежде чем создать физические образцы роботов, ученые прибегли к помощи компьютерного моделирования — им нужно было найти подходящие пары форм и передвижения для разных условий. После этого уже начался поиск лучших способов трансформации форм.
Да, с помощью программного обеспечения можно создавать удивительных, изменяющих форму роботов с десятками независимых движущихся частей. Однако одно дело — разработать идеальную модель робота, которая теоретически может выполнять различные задачи, и совсем другое — создать физическое устройство, которое способно делать то же самое в реальных условиях. Ученые столкнулись с проблемой — сложно было заставить физические модели роботов двигаться и трансформироваться так, как это происходило при моделировании.
На видео показана трансформация роботов в разных условиях
Поэтому работа была сложной и кропотливой: после создания физических роботов их сравнивали с компьютерными моделями, чтобы понять, на что они на самом деле способны в реальных условиях. И только после этого создавался окончательный вариант робота.
В процессе работы ученые часто упрощали конструкции, а затем изучали различные способы, с помощью которых роботы могут изменять форму. Выяснилось, что даже относительно небольшие изменения формы ведут к адаптации «походки» робота и он может передвигаться в разных условиях.
Сейчас эта же группа ученых изучает, как использовать искусственный интеллект для повышения гибкости и ловкости механизмов, изменяющих форму. Конечно, в идеале они планируют создать роботов будущего, которые могут одинаково легко плавать в воде, ползать по берегу, быстро скатываться с холмов и передвигаться по улицам городов. А результат нынешней работы может использоваться в качестве научного инструмента для изучения поведения амфибий, различного контроля в труднодоступной местности и даже для доставки, если нужно передвигаться по разным ландшафтам.
 Поделиться
Поделиться




