Микрозаводы для микрогаджетов: кто будет там работать
Группа разработчиков из NTU (Сингапур) создала новых микророботов. Для их производства ученые интегрировали магнитные миниатюрные частицы в биосовместимые полимеры — материалы, которые можно без опасений использовать в человеческом организме. Новые роботы гораздо лучше уже имеющихся мелкомасштабных механизмов: они тоже могут двигаться с шестью степенями свободы, то есть совершать поступательные и вращательные движения по трем осям, но в дополнение к этому они еще очень быстро вращаются (быстрее аналогов примерно в 43 раза) и при этом оператор контролирует все движения с высокой точностью.
Также для изготовления роботов можно использовать мягкие материалы и благодаря этому получать на выходе важные свойства: например, один из новых механизмов умеет «плавать» и воспроизводит движения медузы, а другой обладает таким захватом, что может точно манипулировать миниатюрными предметами.
Но самое главное — роботы управляются с помощью магнитных полей, которые, в свою очередь, генерируются электромагнитными катушками. Причем магнитное поле можно прикладывать и к третьему вектору движения, а не только к первым двум, как было раньше. Оператор дистанционно управляет роботами с помощью программного обеспечения, точно изменяя силу и направленность магнитных полей.
Благодаря малому размеру микророботы особенно интересуют ученых для использования в биомедицине и на микропроизводствах. С их помощью можно заменить хирургические вмешательства на менее инвазивные процедуры и выполнять более точные манипуляции. Учитывая, что у новых роботов крутящий момент в 51–297 раз больше, чем у других подобных устройств, изобретение имеет решающее значение — это огромный прогресс в сфере малых робототехнических технологий.
В лабораторных экспериментах исследователи продемонстрировали ловкость и скорость миллиметровых роботов: они показали, как быстро механизм может проплывать через отверстие в преграде, когда он находится в воде. Таким образом, роботы могут преодолевать препятствия в динамичных и неопределенных средах, а эта способность важна для их использования в биомедицине. Предыдущие разработки в подобных средах имели низкую точность управления, двигались медленно и рывками.
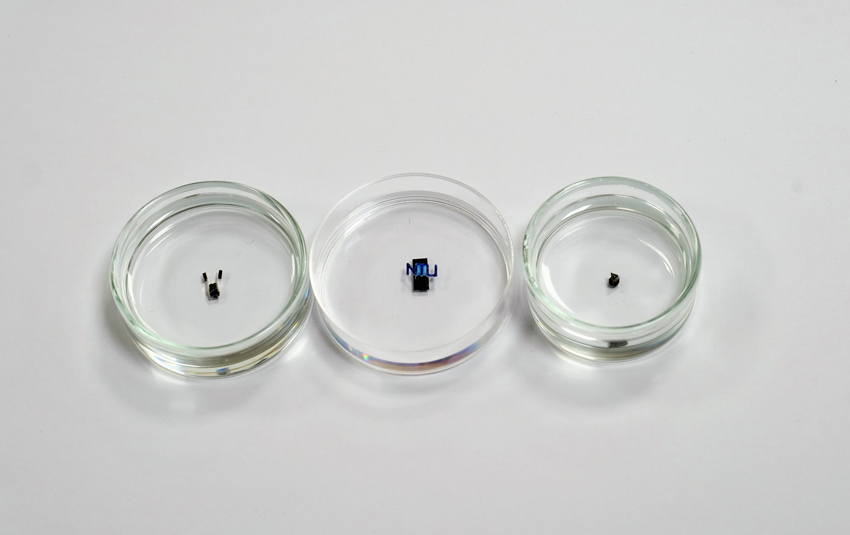
С помощью еще одного робота ученые смогли собрать трехмерную структуру из стержня и двух Y-образных штырей, менее чем за пять минут, что примерно в 20 раз быстрее, чем это могли сделать уже существующие миниатюрные роботы. Это, в свою очередь, доказывает, что разработка может быть использована на микрозаводах, где создают микромасштабные устройства.
Авторы работы рассчитывают, что их роботы в будущем вдохновят других специалистов на создание новых хирургических процедур, например, на мозге. Также они могут быть полезны в биомедицине, например, при сборке устройств «лаборатория на кристалле» для клинической диагностики путем объединения нескольких лабораторных процессов на одном чипе.
Команда ученых теперь планирует еще уменьшить своих роботов (до нескольких сотен микрометров) и сделать их полностью автономными с точки зрения управления.