Насекомые-киборги наводнят дома
Исследователи из Государственного университета Северной Каролины разработали программное обеспечение, которое позволит изучать здания с помощью киборгизованных насекомых.
Новая технология...
Исследователи из Государственного университета Северной Каролины разработали программное обеспечение, которое позволит изучать здания с помощью киборгизованных насекомых.
Новая технология пригодится военным и спасателям, которым приходится действовать в незнакомой среде. В будущем картографировать, например разрушенное здание, сможет рой роботов или киборгизованных насекомых. Управлять роем будет простой алгоритм, опирающийся на хаотическое движение.
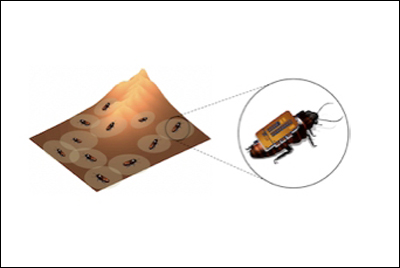
Новая технология позволяет составить грубую карту незнакомой местности с помощью кибернасекомых или живых насекомых с имплантированными датчиками
Сегодня работа в таких местах, как пещеры, тоннели, разрушенные здания и т.п., осложняется отсутствием надежного способа ориентирования в пространстве. GPS в такой среде не работает, а ручное управление роботами по радиоканалу и проводам затруднено.
Новая технология представляет собой программное обеспечение, управляющее роем насекомых-киборгов или биоботов, то есть живых насекомых с имплантированными электронными схемами. Одной из характерных черт биоботов является склонность к хаотическому движению, ученые использовали это случайное движение на пользу.
Новый алгоритм будет работать следующим образом: рой биоботов, например дистанционно управляемых тараканов, оснащенных датчиками, будет выпускаться в разрушенное здание или другое требуемое место. Киборгам первоначально будет разрешено двигаться в случайном направлении. Местоположение насекомых нельзя будет отследить с помощью GPS, но все биоботы будут оснащены датчиками, «чувствующими» близость других биоботов. Таким образом, образуется своеобразная сеть, с помощью которой можно распространять сообщение между членами роя. Через определенное время, операторы посылают рою сигнал двигаться до тех пор, пока не будет достигнута стена или другая непрерывная поверхность. Биоботы будут двигаться вдоль стены, пока не достигнут угла, а затем продолжат движение вдоль следующей стены. Сочетание хаотических перемещений и движения вдоль препятствий позволят картографировать помещение, а информация, собранная биоботами, будет распространяться по сети насекомых пока не достигнет пункта управления роем.